
Types of LiDAR - Technical Architecture
2024-05-25
According to the technical architecture, it can be divided into mechanical lidar that rotates as a whole, hybrid solid-state lidar with stationary transceiver modules, and solid-state lidar.
Compared with hybrid solid-state and solid-state lidar, the advantage of mechanical rotating lidar is that it can scan the surrounding environment with a 360° horizontal field of view, while hybrid solid-state and solid-state lidar can often only achieve a maximum of 120°. Horizontal field of view scanning, and the uniformity of ranging capabilities within the field of view is worse than that of mechanical rotating lidar.
Due to the complex operating environment of driverless cars, they need to have the same ability to perceive the surrounding 360° environment. Mechanical rotating lidar has the advantages of both a 360° horizontal field of view and long range measurement capabilities. Currently, mainstream driverless projects Mechanical rotating lidar has been adopted as the main sensing sensor.
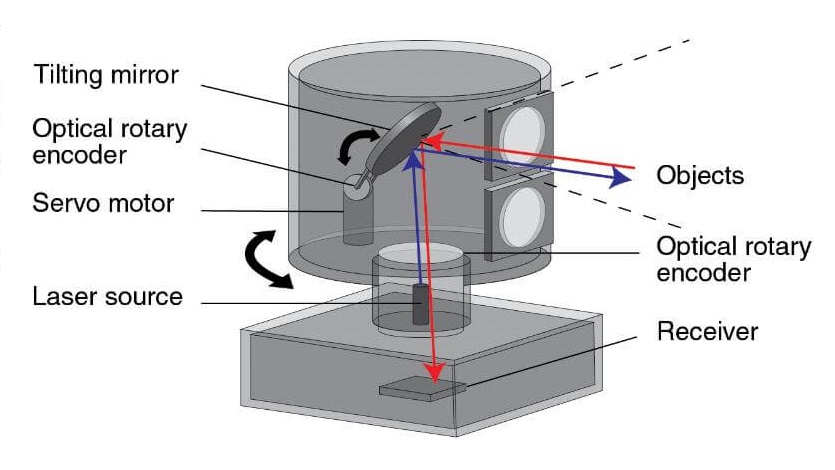
Mechanical Rotating Lidar
Mechanical rotating lidar is an earlier type of lidar. The technology is relatively mature at present. However, the structure of the mechanical rotating lidar system is very complex, and the core components are also quite expensive, which mainly include lasers, scanners, and optical components. , photodetectors, receiving ICs, and position and navigation devices, etc. Due to the high cost of hardware, mass production is difficult, and stability needs to be improved.
Hybrid Solid-State Lidar
Hybrid solid-state is currently the most mainstream structure of lidar, and its system includes a fixed light source and a dynamic scanning system. Compared with mechanical rotating lidar, although the field of view of hybrid solid-state lidar is relatively narrow, it has the advantages of simpler structure and lower cost, and is suitable for mass production as a front-facing main lidar. The scanning methods of hybrid solid-state lidar can be subdivided into single-axis mirror scanning, dual-axis mirror scanning, MEMS and prism scanning.
Solid State Lidar
Solid-state lidar is the development direction of lidar, mainly including Flash lidar and OPA lidar. Pure solid-state lidar further simplifies the mechanical structure based on the hybrid solid-state solution. It uses a fixed light source and a fixed detection mode. It does not require scanning devices to achieve lower costs and no need to worry about motor stability.
According to the survey results, the current shortcomings of pure solid-state lidar have not been completely solved. Among them, the disadvantage of Flash lidar is that the detection distance is short; OPA lidar has strict material requirements, and the current products can only detect a distance of 20-30m.
The principles of Flash solution and camera imaging are very similar. The optical path and architecture of the Flash solution are relatively simple, the transmission and reception are symmetrical, there are no scanning components, the cost is lower, and the reliability is higher. The disadvantage is that no matter what kind of light source is used, the energy dispersion after emission will lead to a decrease in ranging capabilities.
OPA lidar is usually paired with FMCW ranging method. In the future, it is expected to achieve high stability, arbitrary direction control, low cost, ultra-low power consumption with an average power of several hundred milliwatts, and a detection range of more than 500m.
OPA adopts the FMCW principle. After two water ripples are superimposed, if they meet an integer multiple of half wavelength, a coherent addition or intersection characteristic will be formed. This characteristic can be used to control the time difference of wave numbers and thus control the scanning direction. The main advantages of this solution are that the concentration is very high, and the wavelength and direction advantages bring higher signal-to-noise ratio, smaller size, and more suitable for automotive grade requirements.
The difficulty of the OPA solution is insertion loss and side lobes. Specifically, it is because the same beam of light interferes. When several adjacent beams of light meet the conditions, it is easy to form side lobes. The excess energy will divide the main energy of the detection and affect the ranging ability.
From the perspective of scanning methods, lidar has gradually evolved from mechanical to pure solid state. Gain stronger stability, longer life, longer detection distance, higher detection accuracy and lower cost through a structure with fewer parts and more advanced ranging methods.





